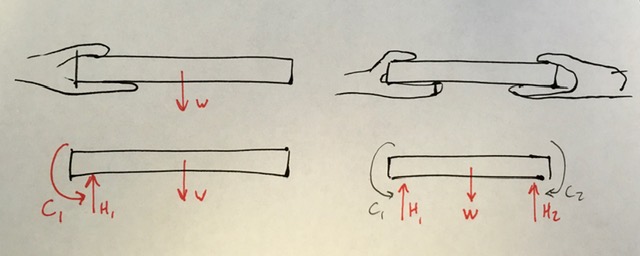
Begin by drawing a neat rectangle to represent the beam disconnected from its supports, then add all the known forces and couple-moments. Label the magnitudes of the loads and the known dimensions symbolically.
Choose the standard
\(xy\) coordinate system, since it aligns well with the forces.
The wall at
\(A\) is a fixed support which prevents the beam from translating up, down, left or right, or rotating in the plane of the page. These constraints are represented by two perpendicular forces and a concentrated moment, as shown in
Figure 5.2.1. Label these unknowns as well.
The knowns in this problem are the magnitudes and directions of moment
\(\vec{C}\text{,}\) forces
\(\vec{B}\text{,}\) and
\(\vec{D}\) and the dimensions of the beam. The unknowns are the two force components
\(A_x\) and
\(A_y\) and the scalar moment
\(M_A\) caused by the fixed connection. If you prefer, you may represent force
\(\vec{A}\) as a force of unknown magnitude acting at an unknown direction. Whether you represent it as
\(x\) and
\(y\) components or as a magnitude and direction, there are two unknowns associated with force
\(\vec{A}\text{.}\)
The three unknown reactions can be found using the three independent equations of equilibrium we will discuss later in this chapter.